Introduction 86
The new walking foot 99
Introduction
Gait analysis in the clinical setting is a valuable part of decision making when initially assessing a child and when reviewing their progress and the effects of any treatments. Normal paediatric gait is complex, but abnormal gait is even more complex as seen in children with cerebral palsy. These children are best assessed with 3-D motion measurement in a gait laboratory, as this gives best diagnosis and therapeutic planning, be this surgical or orthotic in nature. However, the clinician must be able to observe gait simply and make qualitative judgements about a child’s gait based on the visual appearance and noting the following factors:
• balance
• stability
• speed
• movement control
• symmetry
• limb and trunk motion
• weight transfer
• foot type and placement.
Observation gives valuable information about a child’s overall walking pattern and their ability to function. Video gait analysis can be useful to review features without the child being present and to save protracted gait observation.
Key Concepts
Key Concepts
The clinician should be aware that gait on a treadmill is usually quite different to normal gait and observed gait may differ from usual gait. The use of a walkway is therefore recommended.
The history of gait analysis began in Europe in the 17th century and continues to evolve and embellish our current understanding of human walking (Sutherland 2001, 2002). Sutherland has been one of the notable contemporary investigators of paediatric gait, in association with many other prominent scientists, and the reader is directed to this work for greater understanding of this area (Cusick 1990; Gage 1993; Perry 1992; Rose et al 1991; Sutherland 1978, 2001, 2002).
Paediatric gait and stance
We need to remember that human bipedal walking is preceded by a number of necessary preparatory stages (Cusick 1990).
Key Concepts
Key Concepts
The basic antigravity skills adopted in both prone and supine floor positions are essential in the development of the infant’s ability to extend and flex joints, lengthen muscles and attain the agonist–antagonist relationship which promotes normal bony modelling and movement patterns (Figs 5.1 and 5.2).


What follows is a summary of the landmark stages in gait development with reference to age-related trends. Note that many of these stages are by definition ‘pre-walking’. The vast realm of pathological gait is largely outside this modest account and the reader is advised to look at the Further reading section at the end of this chapter, and beyond, for deeper understanding and further detail.
The neurodevelopmental progress of newborn term infants is checked routinely by paediatricians at 6 weeks of age. At this time, a reduction in flexor tone of the limbs is observed, together with an increase in active neck tone. Visual orientation improves by 3 weeks when normal infants can follow a target in a full circle compared to newborns that are often only able to follow a target in an arc. Research results suggest that 6 weeks post-term birth is an important milestone for changes in neurological signs, particularly those related to muscle tone and posture, which reflect maturation of the nervous system (Guzzetta et al 2005).
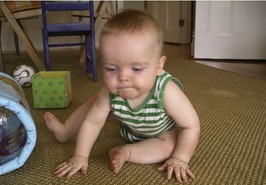
Sitting
Sitting is a real landmark in the child’s development and is usually accomplished by approximately 6 months of age. Sitting indicates that the child has attained enough strength in the neck, trunk and hip extensors to be able to hold a raised head position against gravity while maintaining a sitting position on a stable pelvis. The legs and feet are usually in front of the child. The legs are laterally rotated and the feet abducted. This position (sometimes called ‘ring sitting’) provides good stability against forward or lateral falling. However, the new sitter is prone to falling backwards, which is why experienced parents, grandparents and miscellaneous caregivers rush to place pillows behind the novice sitter. When the child has learned to balance their extension and flexion, they can begin to introduce both lateral and rotating movements (Fig. 5.3).

The evident pattern of movement development at this stage is to be repeated in the development of later gait phases; i.e. sagittal plane motions:
• precede frontal plane motions
• precede transverse plane motions.
Abnormal sitting where the child sags back onto their sacrum may occur in children with spastic diplegia. In these children, there is lack of trunk extension strength, inadequate hip joint mobility and shortness of hamstrings, adductors and abdominals. These children will have to compensate for their lack of available movement ranges and develop irregular gait patterns. Hypotonia may also be associated with seated ‘sagging’ but is usually associated with normal to increased hip range.
‘Ring sitting’ posture provides the stability from which a child can lean forward into a three-point vault and eventually creep on all fours. The child usually tummy crawls around 5 months of age when they ‘swim’ prone and exercise good spine and hip/knee extension (Fig. 5.4).

Creeping
From the lower limb perspective, active weight-bearing and rocking motions on hands and knees strengthens and stabilizes the hips, deepening the pelvic acetabular cups. Coupled eccentric and concentric contractions around shoulders and hips prevent the infant from falling forward and onto their face by initiating a backward shift. Pelvic support is essential at this stage and requires abdominal muscle efficiency.
Creeping usually follows from playing where a child will reach and lean and diagonally load the non-reaching side. Stability of the loaded side is required and the adductors stabilize the loaded hip. Reciprocal creeping occurs as an extension of this unilateral reach and lean, where each side takes its turn. Learned proficiency and maturity of the neuromotor structures mean the child will narrow their quad-base of support (as later occurs with bipedal walking) and develop counter-rotations between shoulders and pelvis (as also occurs with maturity of the later walking pattern).
Reciprocal creeping appears to apply a lateral torque to the pushing side femur above an extending knee and laterally rotating hip (Fig. 5.5). Adductor magnus acts to stabilize the hip and in so doing contributes to the torque force through the femur, which in turn reduces femoral torsion (approximately 40° medial at birth and ‘unwinding’ 25% in the first 24 months).

Some children do not creep properly, preferring to ‘bottom shuffle’ along in a sitting position. This may be due to hypotonia which results in inadequate stabilizing of shoulders and pelvis, or may be associated with sensory integration and result from tactile defensiveness. Examination and wider history taking will usually distinguish low muscle tone from noxious sensory input by elucidating some key factors, e.g.:
| Hypotonia | Sensory integration | |
|---|---|---|
| Concept | –less neural impulses/time to muscles | –noxious experience of (normal) sensory stimuli |
| Clinical signs | – sluggish tendon reflexes – flaccid feel of muscle bellies – late motor milestones | – recoil from touch, e.g. feeding, cuddling, dressing, towel drying – more prone to toe walking (see Ch. 11) – may require desensitizing (paediatric occupational and physiotherapy) |
Propping and bear-standing
Knee extension develops both supine (babies like to play with and ‘eat’ their feet, which extends the knee) and prone positions. There must be good balance control, pelvis and shoulder stability to achieve this posture, which reduces physiological flexion of the lower limbs as follows:
• elongates hamstrings
• elongates triceps surae
• elongates plantar fascia and intrinsic foot muscles
Kneeling
As a natural ‘flop back’ position from moving (‘creeping’) on all fours, the position of knee-sitting arises at around 8 months of age. With variation of this position to side sitting and full sitting, much stability of the hips is required to control lateral and rotating positions. The trunk is lengthened and strengthened and there are forces applied increasingly to develop the femoral greater trochanter (gluteus medius activity) and proximal femoral torsion ‘unwinding’, which contribute to the simultaneous reductions in medial femoral torsion and position (antetorsion and anteversion) (Fig. 5.7; see Ch. 4).

Kneel-sit to kneel-stand positions also reduce femoral torsion by extending hip flexors and mobilizing the anterior hip capsule and ligaments. This also reduces coxa valga by applying force to the abducted femur through the gluteals (especially gluteus medius).
‘W’ sitting (reverse tailor’s position) lowers the pelvis to the floor between the legs and may be seen in children with and without neuromotor problems. These children may show high/age medial femoral torsion (determined clinically using Ryder’s test; Cusick & Stuberg 1992) and which is often familial (‘I used to sit like that too’ says a parent, with retained femoral torsion). According to Staheli (Fuchs & Staheli 1996, Staheli 1987), children with normal muscle tone and increased medial femoral torsion show no limitation of athletic or functional ability. There may, however, be compensation at the knee via greater lateral genicular rotation (Staheli 1987; Fig. 5.8) and patella maltracking, which is apparent as a part of symptomatic patellofemoral syndrome (Beaty 1993).
 |
 Only gold members can continue reading. Log In or Register to continue
Stay updated, free articles. Join our Telegram channel
Full access? Get Clinical Tree
 Get Clinical Tree app for offline access
Get Clinical Tree app for offline access

|